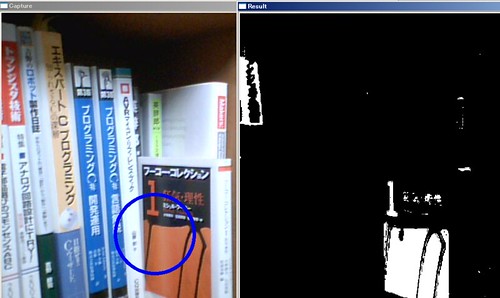
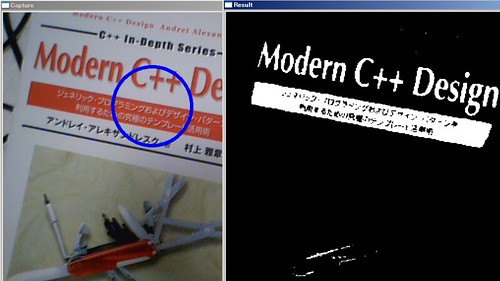
赤色領域を検出(3) 重心も計算
opencvプログラミングブックのp.61肌色領域の重心を検出していたので、同じようにやってみた。この本は説明はわかりやすいけどプログラムが省略されてて肝心の変数宣言の部分や定数define部分が書いてないので大変困る。
まあドキュメント読めば十分わかるからいいけど・・・
cvMomentsで重心を計算して、cvCircleで青い円を描いて示した。画面内に複数領域があると中間を指してしまうのであとでラベリング処理を調べる。
colortrack.cpp 赤色領域を検出(2) - 橋本詳解に重心計算と青い円を描くのを追加しただけ
#include <stdio.h> #include <highgui.h> #include <cv.h> IplImage *img = NULL; IplImage *imgR, *imgG, *imgB, *imgThreshold_R, *imgThreshold_G, *imgThreshold_B, *imgResult, *imgTmp; CvMoments moments; void onMouse(int event, int x, int y, int flags, void* param){ printf("x:%d y:%d r:%d g:%d b:%d %s", x, y, // マウス座標とRGBを出力 (unsigned char)imgR->imageDataOrigin[x+y*imgR->width], (unsigned char)imgG->imageDataOrigin[x+y*imgG->width], (unsigned char)imgB->imageDataOrigin[x+y*imgB->width], "\n"); } int main(int argc, char** argv) { bool isStop = false; CvCapture *capture = NULL; capture = cvCreateCameraCapture(0); //capture = cvCaptureFromAVI("test.avi"); if(capture == NULL){ printf("capture device not found!!"); return -1; } img = cvQueryFrame(capture); const int w = img->width; const int h = img->height; imgR = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgG = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgB = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgThreshold_R = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgThreshold_G = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgThreshold_B = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgResult = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgTmp = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); char winNameCapture[] = "Capture"; char winNameResult[] = "Result"; cvNamedWindow(winNameCapture, CV_WINDOW_AUTOSIZE); cvNamedWindow(winNameResult, CV_WINDOW_AUTOSIZE); cvSetMouseCallback(winNameCapture, onMouse, 0); cvSetMouseCallback(winNameResult, onMouse, 0); int waitKey; while (1) { if(!isStop){ if((img = cvQueryFrame(capture)) == NULL) break; cvSplit(img, imgB, imgG, imgR, NULL); // BGRを分解 // 赤の要素が100以上で、緑と青より1.5倍以上あるピクセルを抽出 cvThreshold(imgR, imgThreshold_R, 100, 255, CV_THRESH_BINARY); cvDiv(imgR, imgG, imgTmp, 10); // 10倍 cvThreshold(imgTmp, imgThreshold_G, 15, 255, CV_THRESH_BINARY); cvDiv(imgR, imgB, imgTmp, 10); cvThreshold(imgTmp, imgThreshold_B, 15, 255, CV_THRESH_BINARY); cvAnd(imgThreshold_G, imgThreshold_B, imgTmp, NULL); cvAnd(imgTmp, imgThreshold_R, imgResult, NULL); cvMoments(imgResult, &moments, 0); double m00 = cvGetSpatialMoment(&moments, 0, 0); double m10 = cvGetSpatialMoment(&moments, 1, 0); double m01 = cvGetSpatialMoment(&moments, 0, 1); int gX = m10/m00; int gY = m01/m00; cvCircle(img, cvPoint(gX, gY), 80, CV_RGB(0,0,255), 6, 8, 0); cvShowImage(winNameCapture, img); cvShowImage(winNameResult, imgResult); } waitKey = cvWaitKey(33); if(waitKey == 'q') break; if(waitKey == ' '){ isStop = !isStop; if(isStop) printf("stop\n"); else printf("start\n"); } } cvReleaseCapture(&capture); cvDestroyWindow(winNameCapture); cvDestroyWindow(winNameResult); return 0; }