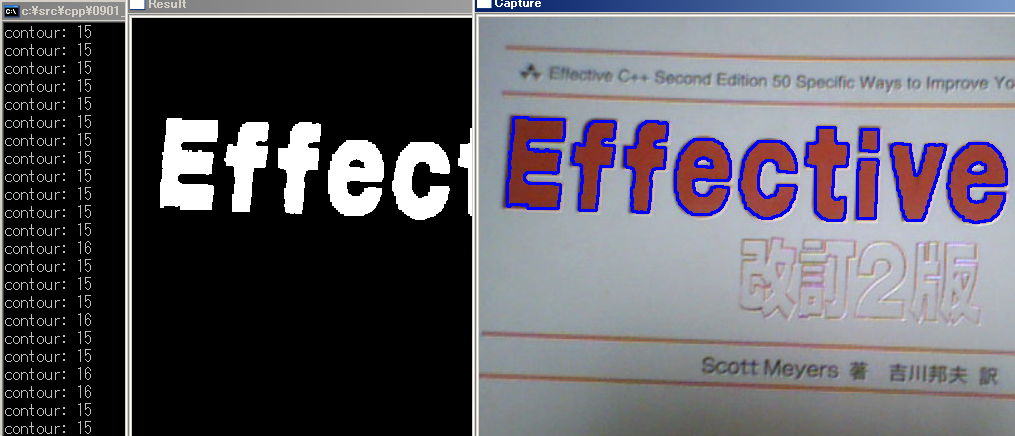
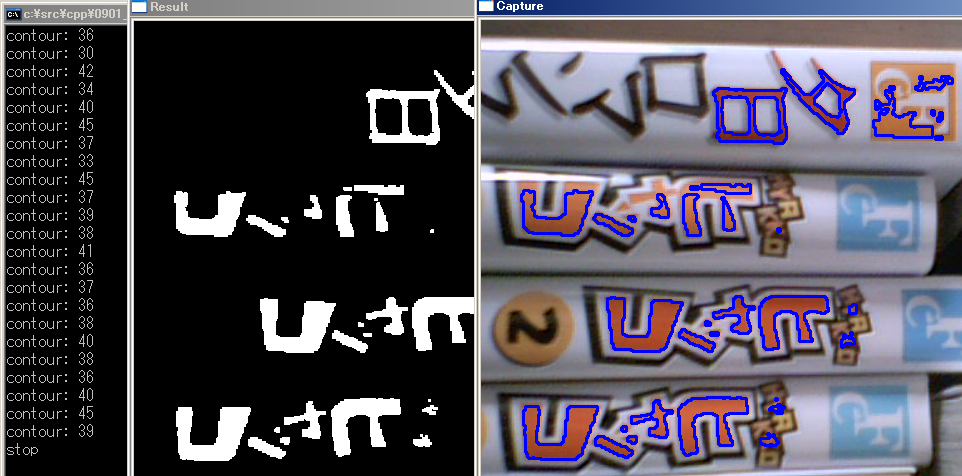
赤色領域を検出(4) 輪郭を囲む
OpenCVプログラミングブック p.154に2値画像の輪郭抽出がcvFindContourでできて、cvDrawContours
で線で囲えると書いてあったので、ちょうど赤色領域抽出でカメラから2値画像を作っていたのでコードを合体させた。
輪郭抽出前に収縮・膨張でノイズを減らしている。もっと収縮膨張度を上げた方が良かったかも
コンソールには輪郭の数を出力している
/*** 赤を検出して輪郭抽出 参考: OpenCVプログラミングブック p.154 ***/ #include <stdio.h> #include <highgui.h> #include <cv.h> IplImage *img = NULL; IplImage *imgR, *imgG, *imgB, *imgThreshold_R, *imgThreshold_G, *imgThreshold_B, *imgResult, *imgTmp; void onMouse(int event, int x, int y, int flags, void* param){ printf("x:%d y:%d r:%d g:%d b:%d %s", x, y, // マウス座標とRGBを出力 (unsigned char)imgR->imageData[x+y*imgR->width], (unsigned char)imgG->imageData[x+y*imgG->width], (unsigned char)imgB->imageData[x+y*imgB->width], "\n"); } int main(int argc, char** argv) { bool isStop = false; CvCapture *capture = NULL; //capture = cvCreateCameraCapture(0); capture = cvCaptureFromAVI("test.avi"); if(capture == NULL){ printf("capture device not found!!"); return -1; } img = cvQueryFrame(capture); const int w = img->width; const int h = img->height; imgR = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgG = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgB = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgThreshold_R = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgThreshold_G = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgThreshold_B = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgResult = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); imgTmp = cvCreateImage(cvSize(w, h), IPL_DEPTH_8U, 1); CvMemStorage* storage = cvCreateMemStorage(0); CvSeq* find_contour = NULL; char winNameCapture[] = "Capture"; char winNameResult[] = "Result"; cvNamedWindow(winNameCapture, CV_WINDOW_AUTOSIZE); cvNamedWindow(winNameResult, CV_WINDOW_AUTOSIZE); cvSetMouseCallback(winNameCapture, onMouse, 0); cvSetMouseCallback(winNameResult, onMouse, 0); while (1) { if(!isStop){ if((img = cvQueryFrame(capture)) == NULL) break; cvSplit(img, imgB, imgG, imgR, NULL); // BGRを分解 // 赤の要素が100以上で、緑と青より1.5倍以上あるピクセルを抽出 cvThreshold(imgR, imgThreshold_R, 100, 255, CV_THRESH_BINARY); cvDiv(imgR, imgG, imgTmp, 10); // 10倍 cvThreshold(imgTmp, imgThreshold_G, 15, 255, CV_THRESH_BINARY); cvDiv(imgR, imgB, imgTmp, 10); cvThreshold(imgTmp, imgThreshold_B, 15, 255, CV_THRESH_BINARY); cvAnd(imgThreshold_G, imgThreshold_B, imgTmp, NULL); cvAnd(imgTmp, imgThreshold_R, imgResult, NULL); cvErode(imgResult, imgResult, NULL, 1); // 収縮 cvDilate(imgResult, imgResult, NULL, 1); // 膨張 // 輪郭抽出、青線で囲む int contour_num = cvFindContours(cvCloneImage(imgResult), storage, &find_contour, sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_NONE, cvPoint(0,0)); CvScalar blue = CV_RGB(0,0,255); cvDrawContours(img, find_contour, blue, blue, 1, 2, 8, cvPoint(0,0)); printf("contour: %d\n", contour_num); cvShowImage(winNameCapture, img); cvShowImage(winNameResult, imgResult); } int waitKey = cvWaitKey(33); if(waitKey == 'q') break; if(waitKey == ' '){ isStop = !isStop; if(isStop) printf("stop\n"); else printf("start\n"); } } cvReleaseCapture(&capture); cvDestroyWindow(winNameCapture); cvDestroyWindow(winNameResult); return 0; }